
2

3

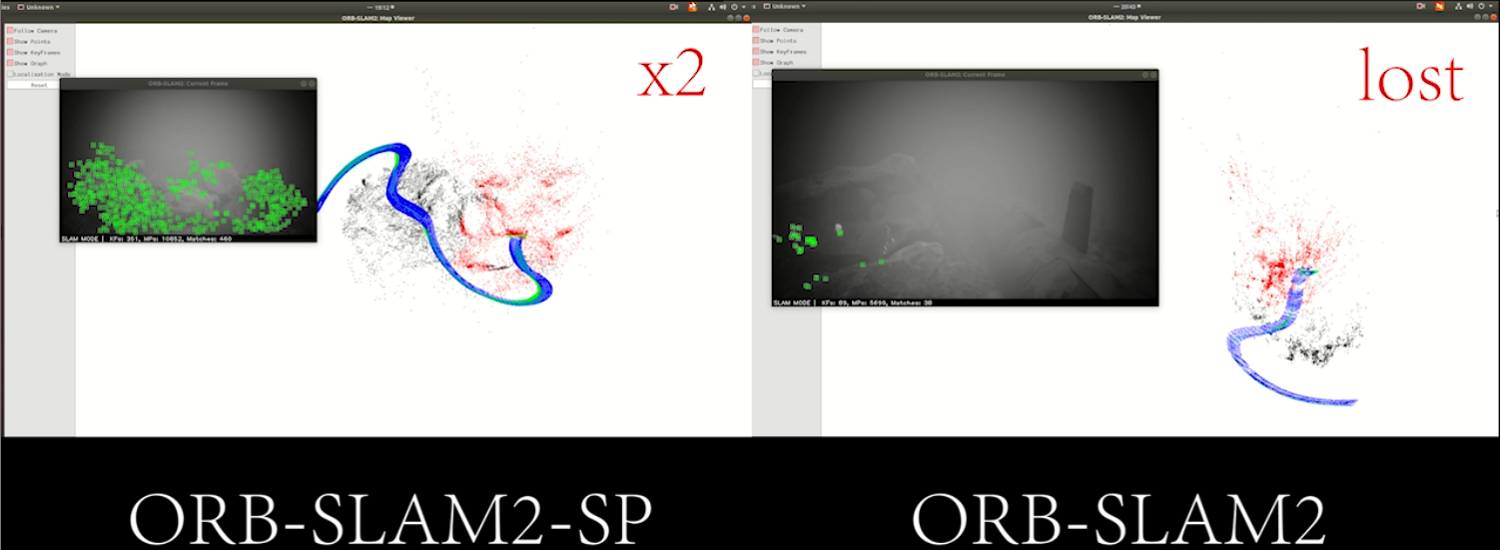
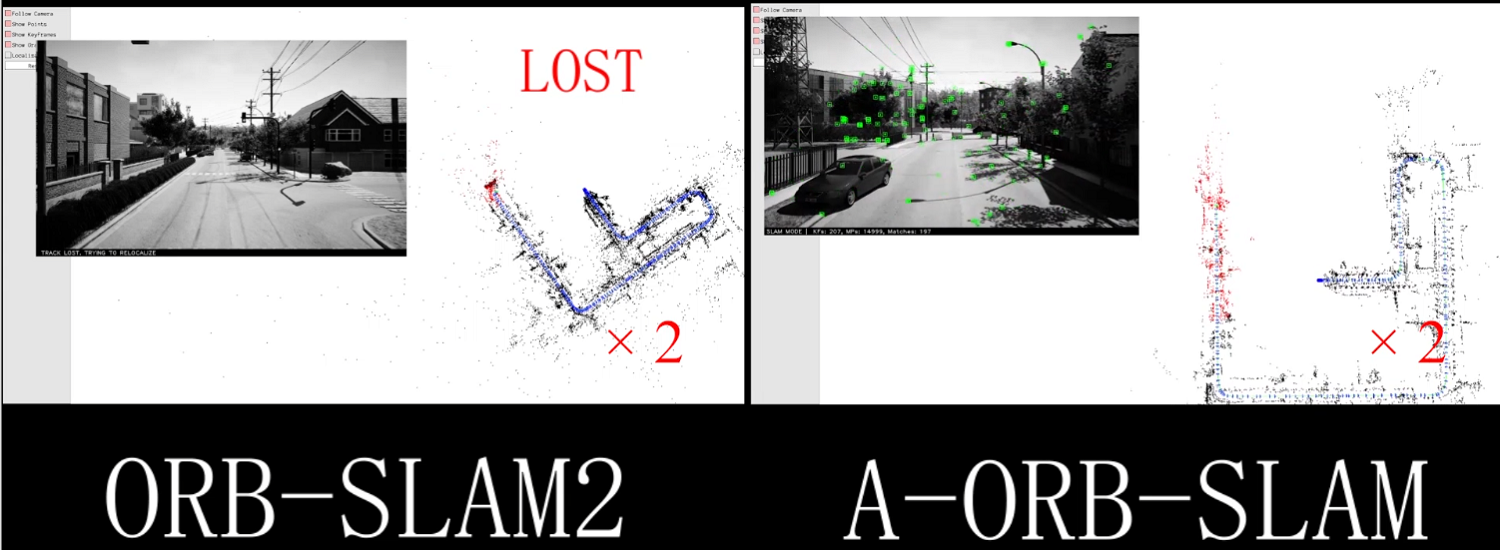
Sequence at different speeds

5

Camera intrinsic
Get the depth map
depth = cv2.imread(frame1.p_depth, cv2.CV_16UC1) points_3d = [(u - cx) / fx * float(depth[v, u]) / 100, (v - cy) / fy * float(depth[v, u]) / 100, float(depth[v, u]) / 100]
Get the ground true
t = [gt[3]/100, gt[7]/100, gt[11]/100]
R = [[-gt[4], -gt[8], gt[0]],
[-gt[5], -gt[9], gt[1]],
[-gt[6], -gt[10], gt[2]]