新一代的导航算法研究思路
传统的导航算法介绍
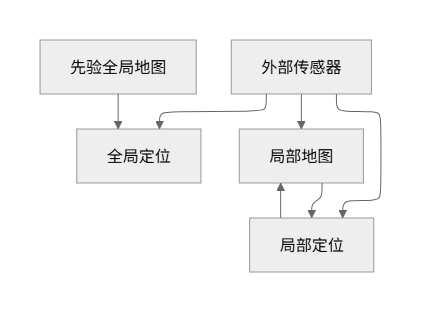
传统定位方法通常依赖于先验全局地图和外部传感器的结合来实现。
- 系统首先利用外部传感器(如GPS、激光雷达、摄像头或里程计)进行感知输入。
- 当有先验全局地图时,传感器信息与全局地图进行匹配,从而得到全局定位结果。
- 在缺乏全局定位或精度不足的情况下,传感器数据还会用于构建局部地图。局部地图与传感器观测不断更新,并通过局部定位模块进行实时位置估计。
- 局部定位和局部地图之间形成闭环:局部定位依赖地图进行匹配,而地图的更新也基于局部定位的结果。
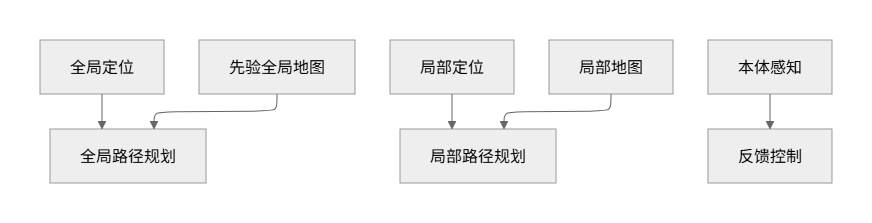
传统路径规划与控制通常分为全局路径规划和局部路径规划两个层次:
- 在全局层面,系统依赖先验全局地图和全局定位,通过路径搜索算法(如A*、Dijkstra或基于图的优化方法)生成一条从起点到目标点的可行路径。
- 在局部层面,系统结合局部定位和局部地图,实时进行局部路径规划。局部规划能够在已有全局路径的指导下,动态避障、修正轨迹,使机器人适应实际环境中的局部变化。
- 最终,规划出的路径由本体感知(如速度、姿态、动力学状态反馈)驱动的反馈控制模块来执行,确保机器人按照预期轨迹稳定运行。
这种架构实现了“全局目标导向 + 局部动态避障 + 底层反馈控制”的完整链路。
新一代的导航
1. 多模态信息耦合的控制算法 (本体通过能力)
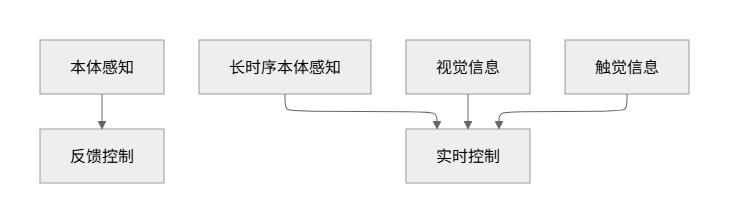
典型的长时序本体感知被用于反馈控制例子是,
- 如果四足机器人盲走到楼梯上,那么它每个腿的落点以及身体的倾角应该包含了楼梯的几何信息,可以用这些信息进行后续的行走。因此,长时序本体感知信息是非常有用的。
- 如果轮式机器人爬一个很陡峭的坡,第一次滑下来了,那么他应该后退给起步距离,然后冲上去
这些都是长时序本体感知用于反馈控制的例子
典型的视觉信息用于前馈控制的例子有
- 望梅止渴,人们看到梅子就自动的产生口水而缓解口渴,这说明视觉是可以直接作用于动作,不需要高级的大脑功能。尤其需要注意的是,这是在吃梅子之前就产生的反应,因此更多是前馈控制。
- 机器人行走在楼梯,不连续的地面等复杂情况时
- 轻车熟路,在某个场景中开车走过了很多遍之后,看到某个场景就会马上执行某些特定动作,而不需要大脑规划路线、感知环境,这似乎是直接从视觉到动作的关联
直接从原始的视觉信息中的反馈控制可以有效的提高反馈控制效率,并且提高机器人在不同地形的通过性,这实际上很多时候并不需要更高级的大脑参与。
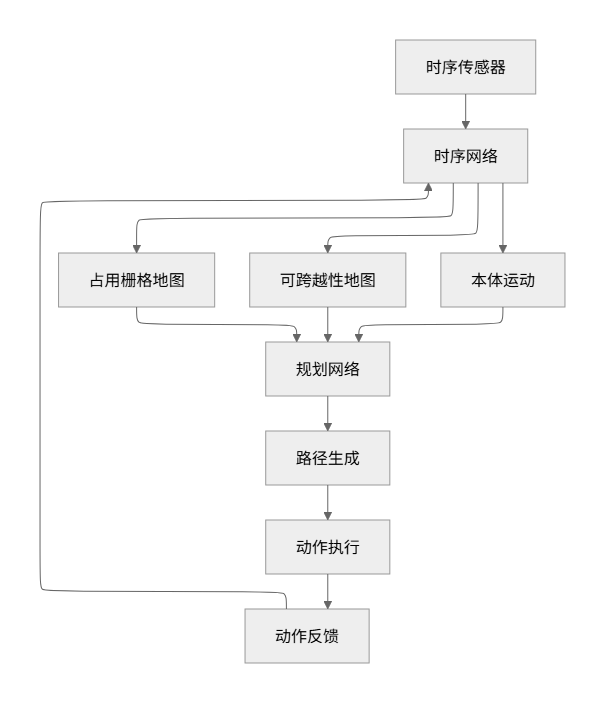
2. 局部环境感知和本体运动估计 (外部感知能力)
发展过程中依托于自动驾驶的发展得到的三种技术路线为:
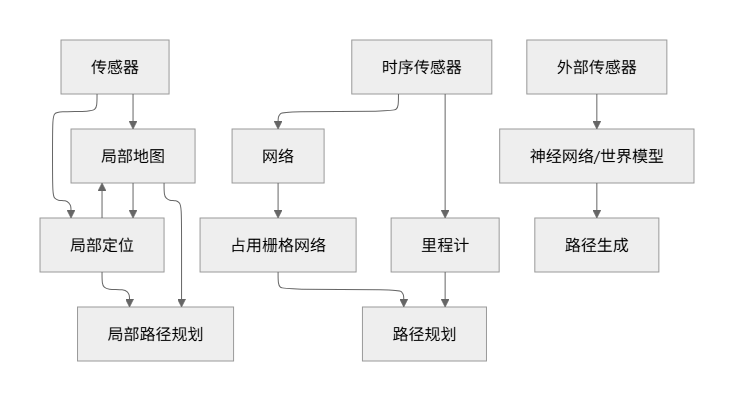
- 局部地图构建与局部定位是非耦合的;在某些极端场景下例如无纹理长走廊,更本不需要定位只需要当前帧信息身成的地图就可以导航,人类可以只根据一张图片即可确定下一步的路径。因此,BEV方案将这一耦合去除,只需要低精度的里程计就够了。
- 一朝被蛇咬,十年怕井绳;动作/行为与感知任务之间存在关联性,每一种物体的感知重要性是不一样的。
- 外部环境感知的目标是安全的执行移动任务,而非感知全部的外部环境;因此,端到端模型中利用路径规划表达指导感知任务,重点关注那些会导致重大安全事故的物体特征,为他们分配最多的资源。所以端到端的训练是必须的,而争议点在于是采用一个整体的模型进行黑箱端到端训练,还是拆分为具有具体功能的可导模块再训练,如下图所示。
- 对于机器人来说,仿真永远仿的不够真实;因此,运行机器人执行错误并且具有自主调整能力非常重要。例如,遇到没见过的地形或障碍物,低速撞上去之后能得到反馈,下次遇到这类情况能更好的处理。
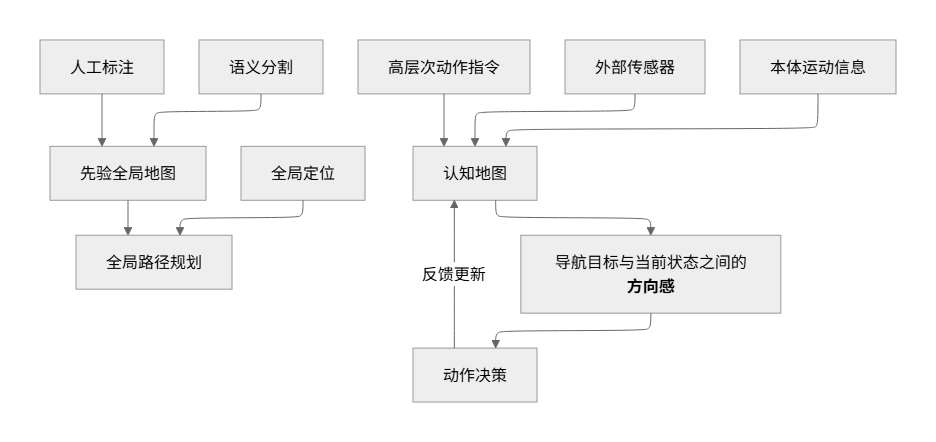
3. 认知地图和方向感导航 (空间记忆和逻辑推理能力)
认知地图的基本功能
- 几何记忆
- 场景理解和逻辑推理
- 拓扑场景关联
- 动作和记忆构建的认知地图是强关联的,即
- 人类开车的时候对直行道路两边的记忆是很少的,因为你只需要往前开就好;但是在转弯或者有多个道路可以选择的区域记忆深刻,因为你要做动作的决策。
- 你可以路过一个小店铺很多次,但是你都不记得它的具体细节,甚至不记得门牌,而当某一天你需要去店铺购买东西,执行很多动作时,大量的细节都会被记忆。
- 认知地图是非欧空间的,也就是拓扑关联的,这一点已经被很多地方论证过
- 人类导航除了开车的导航地图有全局路径规划,大部分时间都依赖于
- 记忆构建的认知地图,给出的拓扑关联估计的方向感
- 一些常识给出最有可能的方向,例如冰箱在厨房,以及公共区域的标志含义理解等
这一部分的研究主要分为两类方案
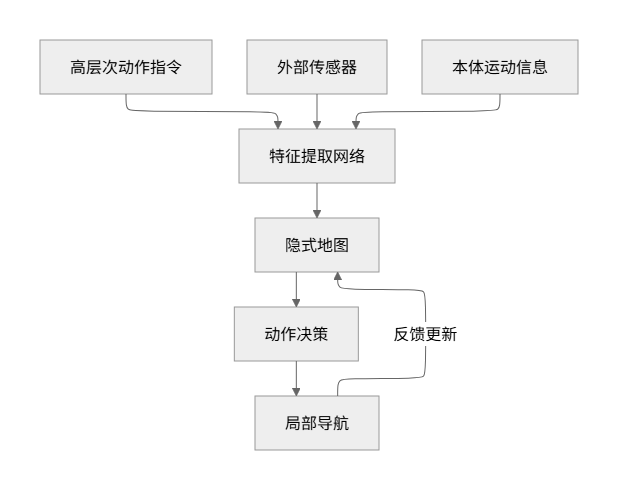
3.1 端到端导航
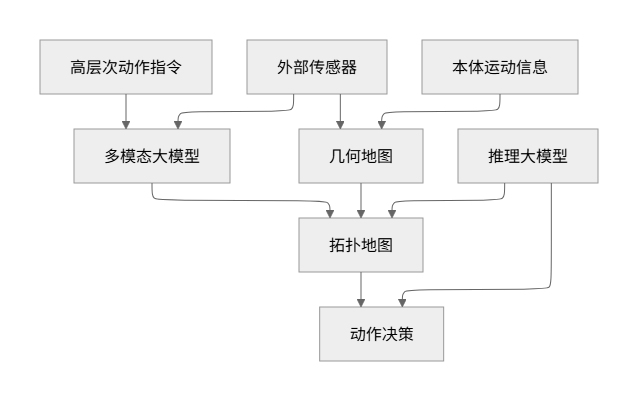
3.2 模块化导航
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.



