About Me
A PhD student in the school of Artificial Intelligence and Automation, Huazhong University of Science and Technology. My research interests include SLAM, visual-inertial odometry, deep learning, and robotics.
Education
- 2016.09 - 2020.06, Bachelor, Huazhong University of Science and Technology, China
- 2020.09 - 2022.06, Master, Huazhong University of Science and Technology, China
- 2022.09 - present, PhD student, Huazhong University of Science and Technology, China
Publications
[1] Y. Lin, S. Wang, Y. Jiang, B. Han, “Breaking of brightness consistency in optical flow with a lightweight CNN network”, Submission in progress (ICRA2024)
Video Code
[2] Y. Lin, Z. Li, T. Zhang, X. Chen, B. Han, “FKM-EVO: An Image Matching Benchmark and Evaluation based on SLAM Matching Modes”, Submission in progress (TII)
Web Video Code
[3] B. Han, Y. Lin, Y. Dong, H. Wang, T. Zhang and C. Liang, “Camera Attributes Control for Visual Odometry With Motion Blur Awareness,” in IEEE/ASME Transactions on Mechatronics, vol. 28, no. 4, pp. 2225-2235, Aug. 2023
Paper Video
[4] Y. Lin, Z. Li, Y. Jiang and B. Han, “MLPoint:An Efficient Multi-Layer Feature Point with Resource Awareness,” Submission in progress (CVPR2024)
Awards and Honors
[1] ICCV 2023 SLAM Challage 2nd in VIO
[2] RoboMaster 2020 Second National Award (Team leader)
[3] RoboMaster 2019 Second National Award (Drone Group leader)
[4] RoboCup 2018 Second National Award
Projects
laser_localization
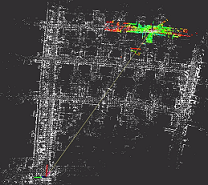
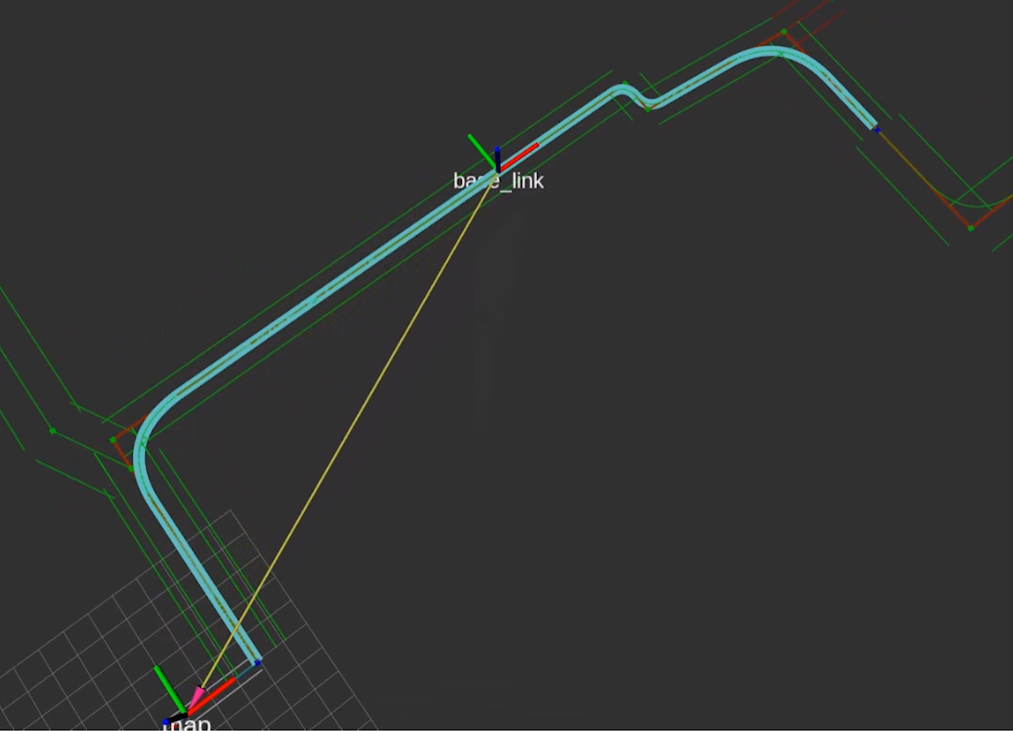
laser_localization is a 3D LiDAR localization algorithm applied to small area scenes, typical application scenarios are industrial parks, neighborhoods or substations, etc. It combines 3D laser point cloud, wheeled odometer and IMU angle information to achieve high precision real-time positioning.
Code Video1 Video2
Structured Road Cruise Path Planning
Global paths are searched in structured roads using A*, then Bessel curves are used to smooth the paths and assign speeds, and the mpc model predictive control tracks the smoothed trajectories.
Video
Application
Railroad signal room inspection robot
An inspection robot applied to a railroad control signal room, using 2d radar for positioning and navigation. A modified cartographer is used for map construction and localization. In addition, hybrid A* algorithm is used for global path planning and teb algorithm is used for local path planning. The captured images are processed in real time by YOLOv5 and the values of devices.
Video
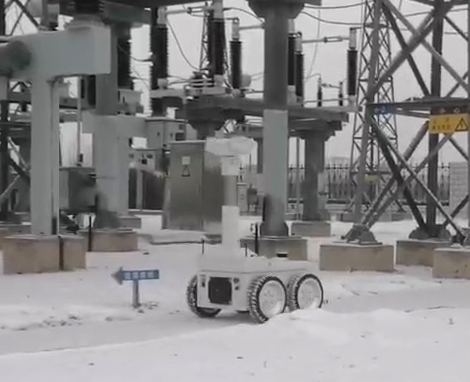
Outdoor Electricity Inspection Robot
An inspection robot applied to the state of outdoor power substations. A 3d radar is used for positioning and navigation. A map is constructed using hdl_graph_slam and then laser_localization project is used for localization. The global paths are constructed using the A* algorithm in a graph network based on straight lines and inspection points.
Video
Chemical factory inspection robot
Inspection robots for methanol chemical plants with the highest level of explosion protection Exd II C.